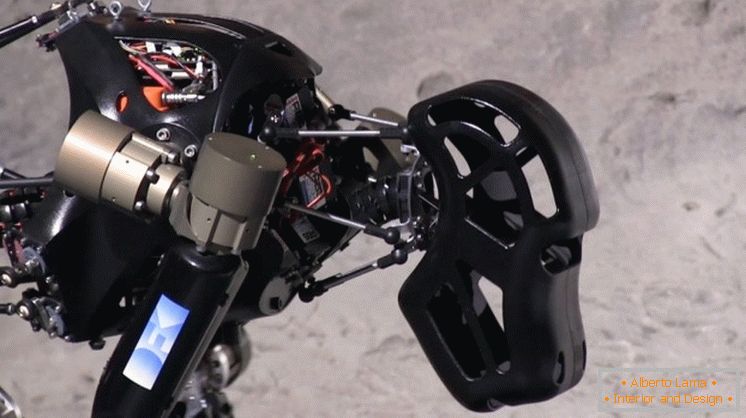
Німецький дослідний центр штучного інтелекту (DFKI) і Бременський університет працюють над мавпоподібних роботом iStruct Demonstrator, його класифікують як «космічного робота». Зараз механічні мавпи проходять тести на ходьбу і рівновагу в умовах наближених до рельєфу місяця.

Вивчення небезпечних місячних поверхонь вимагає застосування різних форм пересування, і дослідники з DFKI вивчають їх можливості (включаючи комбінацію ніг, коліс і гусениць). Мавпоподібні роботи мають певні переваги в порівнянні з колісними, чотирьохточкові опора дозволяє створити більш стійку позицію при карабканье через перешкоди або горбисту місцевість. Робот може балансувати на задніх лапах, щоб звільнити передні кінцівки для виконання будь-яких дій.

З новими міжнародними інтересами до місячної місії, є ймовірність, що iStruct (або один з його нащадків) зможе побувати на Місяці. Колонізація Місяця роботами почнеться з розробки, яка зможе розвиватися і розумно реагувати в будь-який ситуації, сітуаціі.В зв'язку з цим, метою проекту є побудова «просунутого штучного інтелекту» і роботизованої системи, яка зможе навчатися, і орієнтуватися на околицях.
У робота є шарнірний хребет з'єднує тулуб і таз, надаючи йому більшої гнучкості, а так же датчик навантаження стопи і гомілковостопного суглоба, які реагують при контакті з землею.
Інші характеристики включають:
- 43 незалежних мотора;
- Шість додаткових датчиків FSR на відкритих частинах, які використовуються для виявлення перешкод;
- 6-осьової Torque-датчик;
- Цифровий 3-осьовий акселерометр, для сприйняття орієнтації стопи в просторі;
- Два температурних датчика для компенсації температурних змін в електроніці;
- Цифровий магнітний датчик кутового контролю кожної рухомої осі стопи і гомілковостопного суглоба;
Більшість роботів вже містять багато з цих датчиків, але зчленований хребет iStruct (який може функціонувати як 6-осьового сіломоментного датчика) щось на зразок рідкості для опорно-рухових роботів, який допомагає при русі на четвереньках. Датчики в стопах і гомілковостопних суглобах дозволять йому зберегти рівновагу на похилій поверхні.
У 2008 і 2009 роках, дипломований інженер Даніель Кюн працював над аналогічним роботом. Маленька мавпа, яка була здатна на просту чотириногого ходьбу. Після цього проекту він почав роботу над iStruct, який має ряд істотних оновлень. Це значно більшу вагу, 18 кг (40 фунтів) і розміри 66 х 43 х 75 см (26 х 17 х 29 дюймів), а також містить 26 ступенів свободи, і харчування від різних електродвигунів. Проект повинен бути завершений в серпні цього року.
Ви можете бачити, як він використовує свої інтелектуальні стопи і гомілковостопні суглоби при ходьбі і збереженні рівноваги на відео нижче. Це маленький крок для робота мавпи, але потенційно гігантський стрибок для всієї робототехніки подібної конструкції.
Ходьба
Балансирование
Фотогалерея Всього | 14 фото